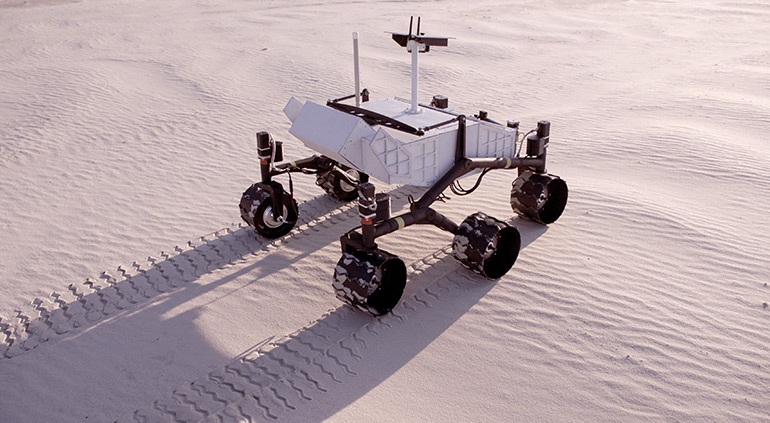


Earth7 is planetary rover revealed as a part of S7 Airlines brand campaign — Best Planet We Know. Interactive experience combines cutting edge space technology with simple gesture control to enable users to manoeuvre the unique rover and explore the remote location 5000 miles away where it was situated. Seated in front of a huge screen transmitting Earth7’s live location, participants were able to remote control it with just a flick of the hand thanks to a high speed data connection and kinetic armband.
CASE STUDYPRODUCTION STORYOriginal VideoWe built the rover that can survive hours of autonomous operation during live gaming experience. It can withstand hits, bumps, rocks, different temperatures and most importantly – unpredictable human movements. Rocker-bogie suspension with 20 cm aluminum wheels turns this custom made rover into off-road machine that can move even on a wet muddy surface, overcome obstacles up to 40 cm height and drive under 45 degree angle. Every wheel has its separate engine, they are powered by two 20Ah batteries. Main goal of the game is collecting life samples and even thought these samples are virtual, we needed a real physical robot arm that will be fully functional during the experience.
To make it feel like a game rover reaction has to be less than a second. No satellite solutions can ensure it, as their minimum lag is 2 seconds in every direction and 4 in general. We had constant 2 way data exchange: rover control signals from Moscow and Hight Definition video stream from the location.
So we set-up a dedicated channel 5000 km long from the event location to the middle of the desert. 97% of the way the signal is transmitted through fiber optics and for the rest 3% we set up 100 km AirWare radio channel (three 10-meter towers that we built just in the desert).



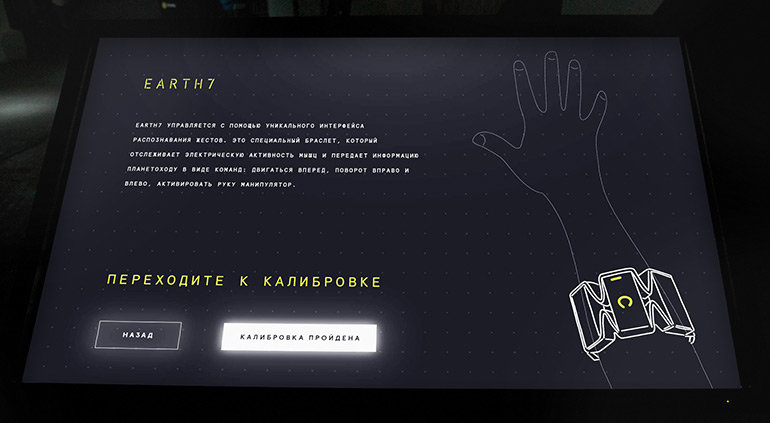
Any person from the street with zero skills should be able to control the rover under time pressure of live stream game. To make it possible we have to achieve seamless connection between human and machine. Pilot just needs to move his hand and the rover will follow. No buttons and common controllers.
We used special MYO armband that reads hand’s muscles impulses with EMG sensors and sends signals back to the rover in a form of simple commands: go forward, move to the right, left and activate robot arm. This gesture powered interface turns advanced robotics system into a fun gaming experience anyone could play. All you need is one minute to calibrate your armband.

Aside from all the science stuff, Earth7 is really a game. It is dislpayed on 5 meter curved screen with real sound from location. Each participant driving the rover had the opportunity to win return tickets for two to any S7 destination worldwide, if they could collect three samples of life on Earth. From Jamón to kite-surfing, over 50 samples of life on Earth were rendered on top of the rover’s live video stream in a dynamically generated gaming interface to encourage players to explore the terrain. Randomly generated each game to ensure a unique experience per player, each pilot had 90-seconds to find their first sample, followed by a minute to find the second one and, if successful, another minute to find the last one to win a golden ticket.